バンド型センサによる把持データ収集システム
Grasp Capture by a Band Sensor
2015
宮田なつき,杉浦裕太,朴木健裕,前田雄介,遠藤維,多田充徳
Natsuki Miyata, Takehiro Honoki, Yusuke Maeda, Yui Endo, Mitsunori Tada, and Yuta Sugiura
[Reference /引用はこちら]
Natsuki Miyata, Takehiro Honoki, Yusuke Maeda, Yui Endo, Mitsunori Tada, and Yuta Sugiura, Grasp sensing for daily-life observation – concept proposal and prototype implementation for cylindrical object –, The 4th International Digital Human Modeling Symposium (DHM ’16), June 15-17, 2016, Montréal, Canada.
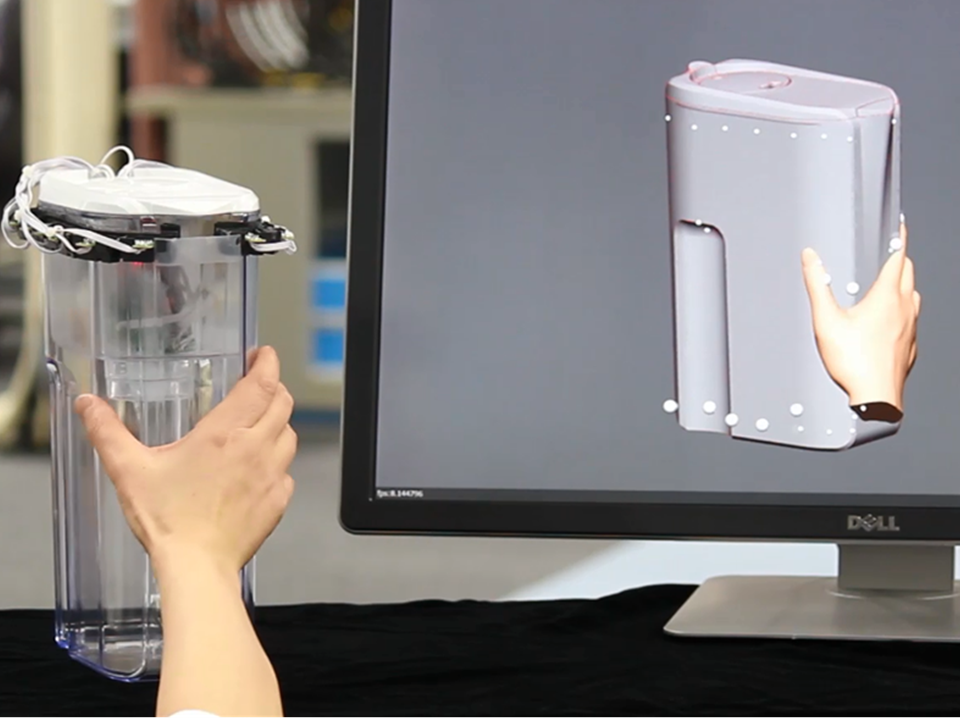
本研究では、物体に簡易なセンサユニットを設置することで、手には何も装着することなく把持姿勢を計測するシステムを提案する。人の手の姿勢を計測する多くの手法では、手にマーカやグローブ等を装着する必要があるが、装着による心理的・物理的影響により、素手で行う動作とは異なる挙動をとることがあり、自然な動作を観察する目的では問題となる。物体形状が既知で、握力把握など把持の類型が分かっている場合、手の形が規定されることから、手の側面など一部を検出することが出来れば、物体に対する相対的な把持位置姿勢を推定可能と考えられる。そこで、物体に複数の距離センサを列状に配置したバンド型センサを設置して、把持中の手の側面の位置を検出し、計算機上で把持姿勢を確認可能なシステムを構築した。
This paper proposes a bare hand grasp observation system called Wrap & Sense. We built a piece of band sensing equipment composed of infrared distance sensors placed in a line. The sensor band is attached to a target object with all sensors directed along the object surface and detects the hand edge partially. Type of grasp (e.g., “power grasp”) is used in combination with the 3D shape of the object to determine the whole hand posture. Preliminary experimental results and a public demonstration showed that the system is able to reconstruct the hand grasping posture of various users. Three types of application are shown as proof-of-concept.