ロボットの継続的なパフォーマンスのためのビジュアル言語
Designing an Entertainment Experience with Robots
2009
坂本大介, 吉田成朗, 代蔵 巧, 杉浦裕太, 小野哲雄, 稲見昌彦, 五十嵐健夫
Shigeo Yoshida, Takumi Shirokura, Yuta Sugiura, Daisuke Sakamoto, Tetsuo Ono, Masahiko Inami, and Takeo Igarashi
[Reference /引用はこちら]
Shigeo Yoshida, Takumi Shirokura, Yuta Sugiura, Daisuke Sakamoto, Tetsuo Ono, Masahiko Inami, and Takeo Igarashi, RoboJockey: Designing an Entertainment Experience with Robots, IEEE Computer Graphics and Applications, Vol.36, No.1, 62-69, 2015-1-9. [DOI]
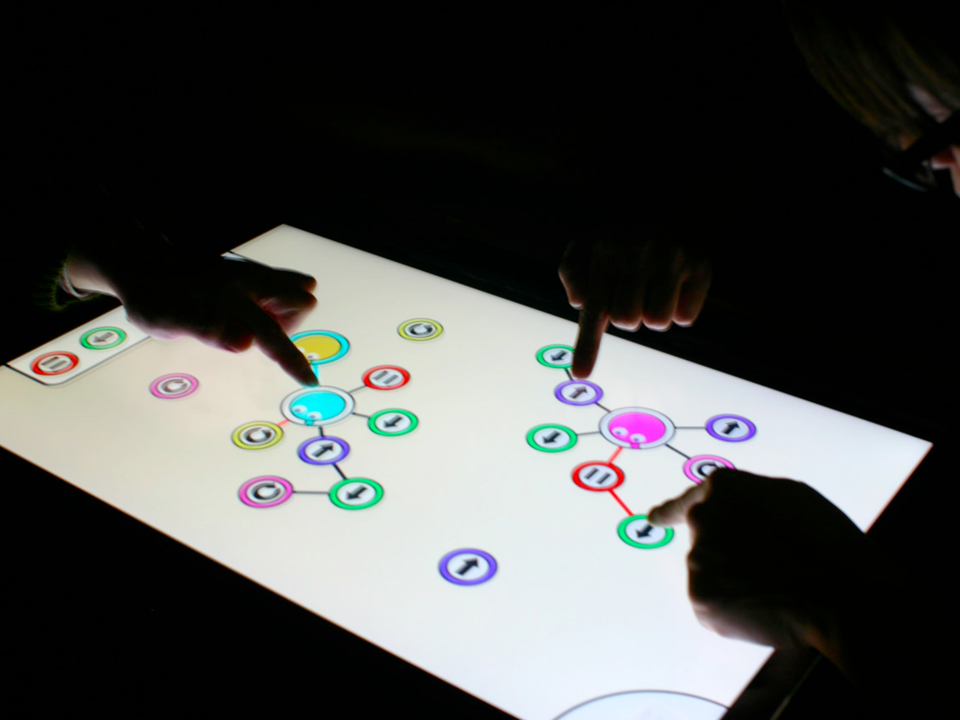
本稿ではロボットを扱ったことがないエンドユーザであっても、音楽に同期したロボットのダンス作成を簡単に行うことができるインタフェースの提案を行う。本インタフェースを用いることにより、ロボッ トの動きを作るユーザとそれを鑑賞するユーザという垣根をなくし、 誰もがロボットの動きのデザインに参加できるという 新しいエンタテインメント体験が実現される。ロボットの動作作成には我々が開発したビジュアル言語を用いる。作成された動作(プログラム)はロボット上で即座に反映される。ユーザは継続的に動作作成を行うことができ、また複数のロボットの動作も同時に作成することができる。これらの機能を通して、本インタフェースはユーザに”Robot Jockey”になったような感覚を与えることができると考えている。
We developed the RoboJockey (Robot Jockey) interface for coordinating robot actions, such as dancing, similar to a "disc jockey" or "video jockey" who selects and plays recorded music or video for an audience, in this case, robot’s actions, and giving people a new entertainment experience with robots. The system enables a user to choreograph a robot to dance using a simple visual language. RoboJockey consists of a multi-touch tabletop interface for multi-user collaboration. Every icon on the interface is circular and can be operated from all positions around the tabletop interface. RoboJockey supports two types of robots, a simple mobile robot and a humanoid robot. Users can coordinate the mobile robot’s actions with a combination of back, forward, and rotating movements, and the humanoid robot’s actions with a combination of arm and leg movements. Every action is automatically performed to background music. We demonstrated RoboJockey at a Japanese domestic symposium, and confirmed that people enjoyed using the system and successfully created entertaining robot dances.